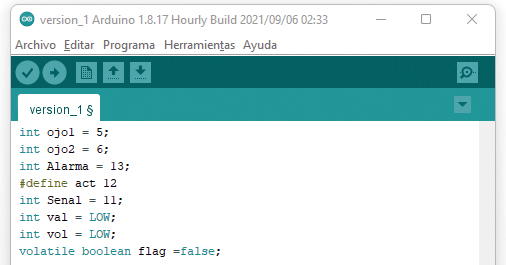
En la primera parte le dijimos a arduino que nombre le ibamos a colocar a los PINES que vamos a utilizar.
En esta segunda parte le decimos a arduino que:
Los ojos van a ser entradas(INPUT) de información (información que nos llega desde el exterior), ya que debe ingresar al chip de Arduino la información de lo que ven los ojos.
La Alarma (La Boca del Robot) será una salida(OUTPUT) de sonido de nuestro Robot hacia el exterior, para que todo el mundo se Alerte.
Lo que llamamos Senal será una salida(OUTPUT) Conectaremos un led en el PIN “11” que iluminará desde el robot indicando que está en “ARRANQUE”, mientras el sensor recien encendido se estabiliza en el ambiente luz(los sensores de movimiento al prendersen tardan aproximadamente entre 30 segundos a 60 segundos en Automodularsen al ambiente). El Led Será Color Azul
El PIN llamado act será otro led conectado al PIN 12, cuando encienda querrá decir que El Robot está en modo VIGILANDO. Si alguien pasa frente a cualquier sensor, el Robot empezara a despertar a los vecinos por la Bulla que va a hacer. El led será color ROJO
void setup() {
pinMode (ojo1, INPUT);
pinMode (ojo2, INPUT);
pinMode (Alarma, OUTPUT);
pinMode (Senal, OUTPUT);
pinMode (act, OUTPUT);
}
Programamos en SenchiBot unas instrucciones que tendrá claras desde el inicio.
Le hemos enseñado 3 palabras a nuestro robot “val y vol” Y normalmente será Cero (0) voltios LOW. Cuando alguno de estos tengan un Voltaje diferente a Cero voltios Sechibot tendra que avisarnos.
“Flag” será normalmente falso (false). Cuando Flag sea TRUE “verdadero” Senchibot se prondrá en modo VIGILAR.